EN
EN  JP
JP  KO
KO  FR
FR  DE
DE  ES
ES  IT
IT  PT
PT  VI
VI  SV
SV  MS
MS 
1、GNSS全球卫星导航系统


GNSS全球卫星导航系统是能在全球范围内提供导航服务的卫星导航系统的统称。
GNSS能在地球表面或近地空间的任何地点为用户提供全天候的3维位置坐标、速度以及时间信息,是一种主要应用于室外的导航技术。卫星不间断地发送自身的星历参数和时间信息,GNSS接收机收到这些信息后,通过对四颗及以上卫星的伪距、多普勒、载波相位测量,经过计算即可求解出接收机的三维位置,速度和时间信息。全球四大卫星导航系统包括美国的全球定位系统(global positioning system,GPS)、俄罗斯的格洛纳斯卫星导航系统(global navigation satellite system,GLONASS)、欧盟的伽利略卫星导航系统(Galileo navigation satellite system,Galileo)和中国的北斗卫星导航系统(BeiDou navigation satellite system,BDS)。
全球卫星导航系统通常由以下三个部分组成:空间部分(卫星)、地面监控部分和用户部分。卫星可连续向用户播发用于进行导航定位的测距信号和导航电文,并接收来自地面监控系统的各种信息和命令以维持系统的正常运转。地面监控系统的主要功能是:跟踪卫星,对其进行距离测量,确定卫星的运行轨道及卫星钟改正数,进行预报后,再按规定格式编制成导航电文,并通过注入站送往卫星。地面监控系统还能通过注入站向卫星发布各种指令,调整卫星的轨道及时钟读数,修复故障或启用备用件等。用户则用GNSS接收机来测定从接收机至卫星的距离,并根据卫星星历所给出的观测瞬间卫星在空间的位置等信息求出自己的三维位置、三维运动速度和钟差等参数。
2、北斗卫星导航系统
概述:
北斗卫星导航系统(以下简称北斗系统)是中国着眼于国家安全和经济社会发展需要,自主建设运行的全球卫星导航系统,是为全球用户提供全天候、全天时、高精度的定位、导航和授时服务的国家重要时空基础设施。
北斗系统提供服务以来,已在交通运输、农林渔业、水文监测、气象测报、通信授时、电力调度、救灾减灾、公共安全等领域得到广泛应用,服务国家重要基础设施,产生了显著的经济效益和社会效益。基于北斗系统的导航服务已被电子商务、移动智能终端制造、位置服务等厂商采用,广泛进入中国大众消费、共享经济和民生领域,应用的新模式、新业态、新经济不断涌现,深刻改变着人们的生产生活方式。中国将持续推进北斗应用与产业化发展,服务国家现代化建设和百姓日常生活,为全球科技、经济和社会发展做出贡献。
发展历程:
20世纪后期,中国开始探索适合国情的卫星导航系统发展道路,逐步形成了三步走发展战略:2000年年底,建成北斗一号系统,向中国提供服务;2012年年底,建成北斗二号系统,向亚太地区提供服务;2020年,建成北斗三号系统,向全球提供服务。
基本组成:
北斗系统由空间段、地面段和用户段三部分组成。
空间段——北斗系统空间段由若干地球静止轨道卫星、倾斜地球同步轨道卫星和中圆地球轨道卫星等组成。
地面段——北斗系统地面段包括主控站、时间同步/注入站和监测站等若干地面站,以及星间链路运行管理设施。
用户段——北斗系统用户段包括北斗兼容其他卫星导航系统的芯片、模块、天线等基础产品,以及终端产品、应用系统与应用服务等。
和芯星通自主研发的导航定位芯片/模块/板卡等产品及提供的服务,属于北斗系统用户段产品。
3、卫星导航定位中PDOP值代表什么?
位置几何精度因子(PDOP)是表征卫星与用户相对位置关系几何强度的参数,用户的定位精度可以简单表示为PDOP*UERE(User Equivalent Range Error),在用户测距误差一定的情况下,PDOP越大定位精度越差,PDOP越小定位精度越高。
4、有源天线与无源天线的区别。
无源天线:不带任何有源器件的天线。
有源天线:是在无源天线后加信号放大器,提高信号强度。
无源天线无需馈电;有源天线必需馈电。
5、PPP是什么?
精密单点定位(Precise point positioning)。利用预报的GPS卫星的精密星历或事后的精密星历作为已知坐标起算数据;基本原理首先是单点定位,这与通用的GPS单点定位一样,区别是精密与否。为了达到精密的效果,PPP有以下特点:
a) PPP提供绝对定位,而不是像RTK那样提供相对于参考站的位置。
b) PPP没有使用差分技术,而是构造无电离层伪距组合观测值和无电离层载波组合观测值,使用双频或多频接收机来消除电离层的一阶效应。
c) PPP使用精密星历和精密卫星时钟数据。PPP也受到卫星是否能见的影响。如果用户不能跟踪所需的卫星,再精确的轨道和时钟数据也无法使用。当一种系统的卫星不可见时,使用其他GNSS系统的卫星,可确保尽可能好的服务。
d) 观测时间越长,精度越高。
6、组合导航 integrated navigation
两种或多种导航装置以一定的方式相结合,提供优于任何单一导航装置的导航性能的技术。
各种导航系统单独使用时很难满足导航性能要求,提高导航系统整体性能的有效途径是采用组合导航技术,即用两种或两种以上的非相似导航系统对同一导航信息作测量并解算以形成量测量,从这些量测量中计算出各导航系统的误差并校正之。
卫星导航系统导航精度高,且不随时间发散,但卫星导航系统频带窄,当运载体作较高机动运动时,接收机的码环和载波环极易失锁而丢失信号,从而完全丧失导航能力;且完全依赖于卫星发射的导航信息,易因城市峡谷、隧道等复杂环境下信号阻塞、多径效应、人为干扰和电子欺骗而出现中断或精度恶化。为提供更精确的实时定位信息,卫星导航系统需要与其他具有互补特性的系统集成,以满足拒止环境情况下的导航定位。
惯性导航系统的优点:
不需要任何外来信息也不向外辐射任何信息,可在任何介质和任何环境条件下实现导航,且能输出载体的位置、速度、姿态等多种导航参数,系统的频带宽,能跟踪运载体的任何机动运动,导航输出数据平稳,短期稳定性好。但惯导系统导航精度随时间而发散,即长期稳定性差。
因此,将卫星导航技术与惯性导航技术以及里程计、视觉等多种传感器组合应用,可以大大提升导航系统的可用性、可靠性、精确性和动态性,实时提供高精度的载体位置、姿态、速度和传感器等信息,可以良好的满足城市峡谷等复杂环境下长时间、高精度、高可靠性导航应用需求。
UM220-INS 系列产品是和芯星通针对车载及高端导航应用推出的小型化 GNSS+MEMS双系统组合导航模块。UM220-INS采用和芯星通完全自主知识产权的低功耗 GNSS SoC 芯片 , 内置 6 轴 MEMS 器件,直接输出 GNSS 与 MEMS 组合定位结果,尤其适合对定位精准度,可靠性和连续性要求严格的应用需求。
7、INS 惯性导航(inertial navigation system)
利用载体上的惯性敏感元件或设备,通过测量载体的运动加速度、角速度,推算载体的位置、速度和姿态角等参数进行导航的技术。
组成惯性导航系统的设备都安装在运载体内,工作时不依赖外界信息,也不向外界辐射能量,不易受到干扰,是一种自主式导航系统。惯性导航系统通常由惯性测量装置、计算机、控制显示器等组成。惯性测量装置包括加速度计和陀螺仪,又称惯性测量单元(IMU)。3个自由度陀螺仪用来测量运载体的3个转动运动;3个加速度计用来测量运载体的3个平移运动的加速度。计算机根据测得的加速度信号计算出运载体的速度和位置数据。控制显示器显示各种导航参数。按照惯性测量单元在运载体上的安装方式,分为平台式惯性导航系统(惯性测量单元安装在惯性平台的台体上)和捷联式惯性导航系统(惯性测量单元直接安装在运载体上);后者省去平台,仪表工作条件不佳(影响精度),计算工作量大。
class="para"惯性导航系统属于一种推算导航方式.即从一已知点的位置根据连续测得的运载体航向角和速度推算出其下一点的位置.因而可连续测出运动体的当前位置。惯性导航系统中的陀螺仪用来形成一个导航坐标系使加速度计的测量轴稳定在该坐标系中并给出航向和姿态角;加速度计用来测量运动体的加速度经过对时间的一次积分得到速度,速度再经过对时间的一次积分即可得到距离。
惯性导航系统有如下主要优点:
1)由于它是不依赖于任何外部信息,也不向外部辐射能量的自主式系统,故隐蔽性好且不受外界电磁干扰的影响;
2)可全天侯全球、全时间地工作于空中地球表面乃至水下;
3)能提供位置、速度、航向和姿态角数据,所产生的导航信息连续性好而且噪声低;
4)数据更新率高、短期精度和稳定性好。
其缺点是:
1)由于导航信息经过积分而产生,定位误差随时间而增大,长期精度差;
2)每次使用之前需要较长的初始对准时间;
3)设备的价格较昂贵;
4)不能给出时间信息。
惯导系统目前已经发展出挠性惯导、光纤惯导、激光惯导、微固态惯性仪表等多种方式。陀螺仪由传统的绕线陀螺发展到静电陀螺、激光陀螺、光纤陀螺、微机械陀螺等。激光陀螺测量动态范围宽,线性度好,性能稳定,具有良好的温度稳定性和重复性,在高精度的应用领域中一直占据着主导位置。由于科技进步,成本较低的光纤陀螺(FOG)和微机械陀螺(MEMS)精度越来越高,是未来陀螺技术发展的方向。
8、星基增强系统SBAS (Satellite-Based Augmentation System)
星基增强系统是利用卫星播发卫星轨道、钟差改正数、电离层格网,完好性信息及其他信息,以大范围提高卫星导航用户精度及其他性能的增强系统。
9、地基增强系统GBAS (Ground-Based Augmentation System)
星基增强系统是利用卫星播发卫星轨道、钟差改正数、电离层格网,完好性信息及其他信息,以大范围提高卫星导航用户精度及其他性能的增强系统。地基增强系统利用地面发射台播发差分修正、完好性信息及其它信息,以提高一定范围内卫星导航用户精度及其它性能的增强系统。
10、DGNSS增强服务 (Differential GNSS Augmentation System)
差分全球卫星导航系统,采用伪距差分技术,提高GNSS用户定位精度的增强系统。
11、A-GNSS辅助定位服务(Asissted-GNSS positioning service)
\
着眼于定位产品瞬时定位的挑战,加快冷启动首次定位时间,辅助GNSS(A-GNSS)服务通过无线网络或互联网向GNSS接收机发送卫星辅助信息用以大大缩短定位所需时间。
12、航位推算DR (Dead reckoning)
一种利用现在物体当前位置,结合速度和方向推定未来下一时刻位置方向的航海定位技术,现已应用至许多交通技术层面,但容易受到随时间误差累积的影响。英语中“Dead”是从“deduced(推导)”转化而来。
13、冷启动/温启动/热启动 (Cold start/Warm start/Hot start)
冷启动:用户接收设备在星历、历书、概略时间和概略位置未知的状态下开机启动;
温启动:用户接收设备在星历未知,历书、概略时间和概略位置已知的状态下开机启动;
热启动:用户设备在星历、历书、概略时间和概略位置已知的状态下开机启动。
14、单频、双频、三频、多频(Single frequency,Dual frequency, Tri-frequency, Multi-frequency)
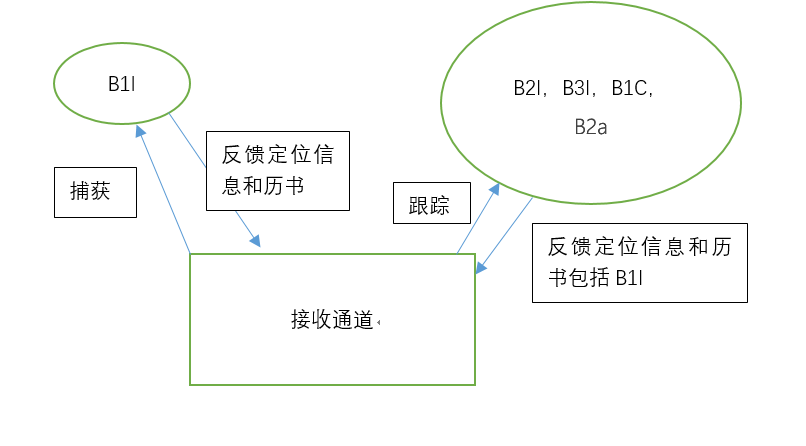
单频是指GNSS接收机工作在单个频段,一般为L1;双频是指GNSS接收机工作在两个频段,一般为L1/L2,或L1/L5,双频接收机可以根据两个频率的观测量抵消大气中电离层误差的主要部分;三频是指GNSS接收机工作在三个频段,一般为L1/L2/L5;多频是指GNSS接收机工作在多个频段,如L1/L2/L5/L6等,通常多频GNSS接收机比单频GNSS接收机具有更高的信号捕获灵敏度、更强的抗干扰性能和更高的定位精度。
15、可靠性(Reliability)
元件、产品、系统在一定时间内、在一定条件下无故障地执行指定功能的能力。可通过可靠度、失效率、平均无故障间隔等来评价产品的可靠性。
16、完好性(Integrity
表征卫星导航系统或GNSS接收机无法使用或性能无法达到标准门限时,及时地给用户发出警报或者告警信息的能力。
17、载波相位(Carrier phase)
载波相位是指收到的受多普勒频移影响的卫星信号载波相位与接收机本机振荡产生信号相位之差。
18、实时动态测量 RTK(Real - time kinematic)
GNSS相对定位的一种,主要通过基准站和流动站之间的实时数据链路和载波相对定位快速解算技术,实现高精度动态相对定位。
基于载波相位观测值的实时动态定位技术,将基准站采集的载波相位发给用户接收机,进行求差解算坐标。
19、定位精度Position Accuracy(CEP、RMS)
空间实体位置信息(通常为坐标)与其真实位置的接近程度。CEP为圆概率误差,以天线真实位置为圆心,偏离圆心概率为50%的二维点位散布半径;RMS为均方根误差,观测值与其真值(或其他外部观测)偏差的平方和均值的平方根,反映测量的准确度。
20、大地坐标系(Geodetic Coordinate System)
原点位于地球质心,Z轴指向(国际时间局)BIH1984.0定义的协议地球极(CTP)方向,X轴指向BIH1984.0的零度子午面和CTP赤道的交点,Y轴满足右手法则。CGCS2000和WGS-84分别是中国和美国GPS采用的坐标系统。
21、伪距(Pseudo range)
由用户设备测出的卫星导航信号传播时间而计算出的卫星与接收天线相位中心之间的距离,其数值等于用户设备信号接收时刻钟面时与恢复的卫星时刻发射时刻钟面时之差再乘以光速得到的距离值。
22、数据协议(Data protocol)
RTCM协议是国际海事无线电委员会为实现不同接收机差分数据格式的统一化,以便差分数据的交换和处理,制定的差分全球导航系统服务标准。NMEA 0183是美国国家海洋电子协会为海用电子设备制定的标准格式,现已成为导航设备数据格式标准。
23、导航电文(Navigation message)
由导航卫星播发给用户,用于描述卫星运行状态和其他参数的信息数据,通常包含卫星健康状况、星历、历书、卫星时钟改正参数、电离层模型参数等。
24、电离层延迟(Ionospheric delay)
导航信号通过电离层时,相对于信号在真空传播而言,产生的传输延时,通常以米为单位。
25、对流层延迟(Tropospheric delay)
无线电信号经过地球大气中的对流层时,受到大气折射的影响,产生时延和路径弯曲,由此造成信号的传播延迟。
26、多路径误差(Multipath error)
指接收机除直接收到卫星发射的信号外,还同时收到经天线周围地物一次或多次反射的卫星信号,这些信号与直接信号叠加,从而使观测量产生误差。
27、抗干扰(Anti-jamming)
是指通过各种技术手段避免在卫星定位过程中干扰信号对导航信号的影响,对卫星导航系统的干扰一般分为压制式干扰和欺骗式干扰两类。
28、定向(Heading)
指双天线接收机的主天线与从天线之间构成一个基线向量,确定此基线向量逆时针方向与真北的夹角。
29、原始观测量(Raw measurements)
原始观测量主要包括伪距观测量、载波相位观测量以及多普勒观测值。
伪距观测量(Pseudo Range Measurements),也叫码相位观测,是指利用测距码(C/A 码或P 码),确定卫星信号到达接收机的时间延迟(距离延迟)。
载波相位测量(Carrier Phase Measurements),就是比较接收机产生的参考载波信号与接收到的来自卫星的含有多普勒频移的载波信号之间的相位差。
多普勒观测值(doppler Measurements)原始多普勒观测值可以用于测定速度,平滑伪距和周跳的探测。
30、通导一体化(integration of communication and navigation)
通信和导航系统通过信号、信息、平台、网络等多层次的一体化设计,实现通信导航业务能力的协同与增强,分为信息增强、信号协同、体制融合。北斗系统与移动通信网络、低轨卫星通信系统的协同应用是信号协同的代表。
31、重捕获时间(Reacqusition time)
用户设备在接收的导航信号短时失锁后,从信号恢复到重新捕获导航信号所需的时间。
32、跟踪灵敏度(Tracking sensitivity)
用户设备在正常定位后,能够继续保持对导航信号的跟踪和定位所需的最低信号电平。
33、捕获灵敏度 (Acquisition sensitivity)
用户设备在冷启动条件下,捕获导航信号并正常定位所需的最低信号电平。灵敏度以负值为单位,负数值越小,信号强度越低,灵敏度也就越高。
34、GPS时GPST(GPS Time)
全球定位系统建立和保持的时间基准,采用国际单位制秒的无闰秒连续时间。GPST起始历元是UTC 1980年1月6日的00:00:00,通过UTC(USNO)与UTC建立联系。GPST使用周计数和周内秒表示。
35、北斗时BDT(BDS Time)
北斗卫星导航系统建立和保持的时间基准,采用国际单位制秒的无闰秒连续时间。BDT起始历元是UTC 2006年1月1日的00:00:00,通过UTC(NTSC)与UTC建立联系。BDT使用周计数和周内秒表示。
36、授时 (Timing )
用广播的方式传递标准时间的过程或技术。授时精度是指接收机输出时间与协调世界时(UTC)之间的偏差统计值,有时也指与卫星导航系统之间的偏差统计值。
37、整周模糊度 (Integer ambiguity )
GNSS卫星信号从发射点到接收点之间的距离所对应的载波整周期个数。该数值无法直接测量得到,也称为整周未知数。
38、载噪比CN0 (Carrier noise ratio )
载波噪声比,同一观测点的载波信号功率与噪声功率之比。
39、芯片制程 (Semiconductor Processing)
制程是指特定的半导体制造工艺及其设计规则。不同的制程意味着不同的电路特性。通常,制程节点越小意味着晶体管越小、速度越快、能耗表现越好。
40、基带芯片 (Baseband Integrated Circuit)
基带芯片主要负责中频信号处理及协议处理,通过信号捕获跟踪尽可能精确地估计出码相位、多普勒频率和载波相位,并进行解算得到定位结果。
41、射频芯片 RFIC(Radio Frequency Integrated Circuit)
射频芯片主要负责对GNSS接收机天线端接收到的微弱信号进行放大、下变频、滤波和量化,提供GNSS基带芯片正常工作所需要的中频数字信号。
42、芯片封装 (Chip packaging)
将集成电路裸片(Die)放到一块起承载作用的基板上,再把管脚引出,固定包装成一个整体。芯片封装起着安放、固定、密封、保护芯片和增强电热性能的作用,而且还是沟通芯片内部世界与外部电路的桥梁。常见的包括QFN,BGA,CSP等。
43、扼流圈天线 (Choke ring antenna)
一种带有多路径抑制槽、可以消除/减弱多路径效应影响的GNSS接收机专用天线,一般用于高精度GNSS测量。
44、参考站 (Reference station)
又称基准站,是在控制点上架设GNSS测量型接收机、通信终端等设备,并在一定时间内连续观测、记录卫星信号,将数据传输给数据处理中心或经处理后直接播发差分改正数据的设施。
45、流动站 (Rover station)
实时接收基准站的差分改正数信息,同时接收卫星信号进行RTK定位解算,实现RTK高精度定位。
46、连续运行参考站系统 CORS(Continuously Operating Reference Station)
由分布于不同区域的安装有GNSS接收机等设备的参考站、通信系统、数据处理中心等构成的地理空间信息基础设施。可连续跟踪接收卫星信号,汇总原始观测数据,处理得到卫星轨道、钟差、载波相位改正值、伪距改正值等各类数据产品的系统。